von Dr. Kai Hoppmann-Baum (Gewinner Dissertationspreis 2023)
In einer Zeit, in der der Klimawandel unaufhaltsam voranschreitet und der Krieg in der Ukraine die Schlagzeilen beherrscht, stehen insbesondere die Betreiber von Gastransportnetzen (ÜNB, Übertragungsnetzbetreiber) vor komplexen Herausforderungen. Denn sie sind das Bindeglied zwischen der Energieversorgung der Zukunft und den geopolitischen Realitäten der Gegenwart.
Einerseits wird der Druck immer größer, fossile Brennstoffe drastisch zu reduzieren, um den Klimawandel einzudämmen. Andererseits bleibt Deutschland stark von Erdgasimporten abhängig, um den Energiebedarf von Industrie und Privatsektor zu decken. In diesem Artikel wollen wir vier zentrale Probleme betrachten, mit denen die ÜNB konfrontiert sind, und Lösungsansätze vorstellen, die auf mathematischer Programmierung basieren.
Wie kann eine funktionierende Netzsteuerung sichergestellt werden?
Das Europa des letzten Jahrhunderts erlebte eine rasante Bevölkerungszunahme und einen Aufschwung der Wirtschaft. Diese Entwicklungen führten zu einem starken Anstieg des Energie- und Erdgasbedarfs. Um diesen zu decken, waren umfangreiche Erweiterungen, Veränderungen und Modernisierungen der Transportnetze unumgänglich. Dadurch entwickelten sich jedoch viele der ursprünglich einfachen Netzstrukturen zu komplexen und schwer überschaubaren Topologien, deren Steuerung zunehmend komplizierter wurde.
Ein weiterer Faktor, der die Netzsteuerung erschwert, ist die wachsende Volatilität der Ein- und Ausspeisemengen. Dies ist zum einen auf die vermehrte Nutzung erneuerbarer Energien wie Solarenergie und Windenergie zurückzuführen, deren Produktion naturgemäß mit einer gewissen Unsicherheit einhergeht. Um diese Unbeständigkeit auszugleichen, werden häufig Erdgaskraftwerke hochgefahren, die kurzfristig hohe Energiemengen liefern können. Das wiederum führt jedoch zu spontanen Nachfragespitzen, die effektiv abgefangen werden müssen. Auf der anderen Seite haben sich die Mengen an den verschiedenen Netzeinspeisepunkten im Allgemeinen drastisch verändert, da Russland als frühere Hauptquelle für Erdgasimporte komplett weggefallen ist.
Um die Übertragungsnetzbetreiber (ÜNB) bei ihrer komplexen Aufgabe zu unterstützen, haben wir daher in enger Zusammenarbeit mit der Open Grid Europe GmbH (OGE), einem der größten Gasnetzbetreiber Europas, das KOMPASS-System entwickelt. KOMPASS steht für „Kontinuierliches Optimierungsmodul zur prognoseabgesicherten Systemsteuerung“ und stellt das erste Decision-Support-System für die Dispatcher dar, die Gasnetze steuern.
Gegeben die Netztopologie, die technischen und physikalischen Daten der technischen Steuerelemente, der aktuelle Zustand des Netzes in Form von Gasflüssen und -drücken, sowie eine Prognose für die zukünftigen Ein- und Ausspeisungen und Einspeisedrücke, wird in KOMPASS ein dreistufiges gemischt-ganzzahliges lineares Programm (mixed-integer linear program, MILP) gelöst, welches darauf ausgelegt ist, wichtige globale Steuersentscheidungen zu treffen, z. B. wie der Fluss zu routen ist und wo und wann Gas verdichtet werden soll. Die Zielfunktionen der beiden oberen Stufen stellen dabei sicher, dass eine machbare technische Netzsteuerung existiert, während Abweichungen von den vorhergesagten Drücken und Flüssen minimiert werden. Ziel der dritten Stufe ist es, mit möglichst wenigen technischen Maßnahmen, d.h. Änderungen in den Betriebsweisen der Netzelemente, eine realisierbare technische Steuerung zu ermitteln.
Unser algorithmischer Ansatz hat vielversprechende Ergebnisse in umfangreichen Rechenexperimenten erzielt, die auf einem großen Teilnetz der Transportinfrastruktur von OGE mit historisch gemessenen Fluss- und Druckwerten durchgeführt wurden. Die ermittelten Lösungen werden von Experten als aussagekräftig erachtet und können zudem schnell und zuverlässig berechnet werden, was für die Nutzung in KOMPASS eine entscheidende Eigenschaft ist.
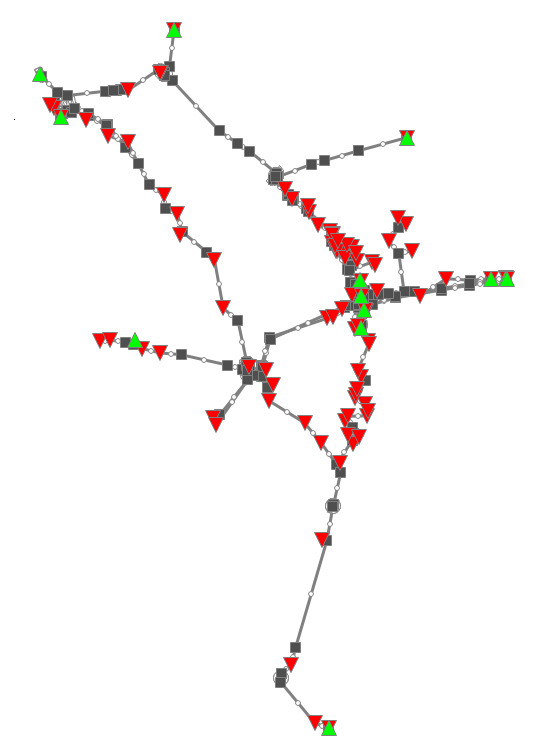
Gasnetzwerk, auf dem die Rechenexperimente durchgeführt wurden. Grüne Dreiecke stellen Einspeisepunkte, rote Dreiecke Ausspeisepunkte und graue Linien Pipelinestränge dar
Können bestehende Erdgasnetze zum Transport von Wasserstoff genutzt werden?
Ein zentraler Bestandteil jeder Strategie zur Bekämpfung des Klimawandels ist die drastische Reduzierung von Treibhausgasemissionen. Diese Reduzierung erfordert in der Regel eine vollständige Ablösung fossiler Energieträger. Ein vielversprechender Ansatz, der dabei eine wichtige Rolle spielt, ist das sogenannte „Power-to-Gas“-Prinzip (P2G). Hierbei wird überschüssige erneuerbare elektrische Energie genutzt, um ein Zwischenbrenngas zu erzeugen. Dieses Brenngas kann entweder gespeichert und bei niedrigem Stromangebot und hoher Nachfrage umgewandelt oder aber auch direkt in der Industrie verwendet werden.
Wasserstoff als Zwischenbrenngas wird aufgrund seiner Vielseitigkeit derzeit besonders intensiv diskutiert. Während er bereits im Automobilsektor als alternativer Kraftstoff Verwendung findet, gibt es noch erhebliches Potenzial in anderen Bereichen, beispielsweise dem Mobilitätssektor oder der Stahlindustrie.
Eine entscheidende Frage lautet jedoch, wie dieser Wasserstoff gespeichert und transportiert werden kann. Hier bieten sich Pipelinenetze mit ihren zugehörigen Speichern als Lösung an, um dicht besiedelte Gebiete mit hohen Bedarfen zu versorgen. Der Bau neuer Pipeline-Infrastrukturen ist jedoch teuer und zeitaufwendig. Daher wird die Idee, die bestehende Erdgas-Transportinfrastruktur für den Wasserstofftransport umzuwidmen, immer attraktiver.
Bisherige Studien haben sich dabei hauptsächlich auf technische Aspekte konzentriert, wie z. B. die Eignung der installierten Pipelines für den Wasserstofftransport. Eine wichtige Frage, die bisher jedoch weitgehend unbeantwortet blieb, ist, wie sich die Steuerung eines solchen Netzwerks im Vergleich zum Erdgastransport ändern würde.
In Anlehnung an den bereits beschriebenen Algorithmus für Erdgas haben wir auch einen speziellen Ansatz zur Bestimmung einer stabilen transienten Netzsteuerung für Wasserstoffnetze entwickelt. Durch eine Anpassung der genutzten Erdgastransportszenarien konnten wir zeigen, dass die Steuerung eines umgewidmeten Netzes grundsätzlich möglich ist, wenn bestimmte Rahmenbedingungen erfüllt sind. Zum einen müssen die derzeit installierten Erdgas-Kompressoren durch spezielle Wasserstoff-Kompressoreinheiten ersetzt werden, um eine praktikable technische Netzsteuerung überhaupt möglich zu machen, was auf die unterschiedlichen Dichten der Gase zurückzuführen ist. Auf der anderen Seite haben wir festgestellt, dass aufgrund des reduzierten Linepacks, also der in den Pipelines speicherbaren Energiemengen, zusätzliche technische Maßnahmen erforderlich sind, da Wasserstoff zu entfernteren Teilen des Netzes transportiert oder von dort abgerufen werden muss. Daher erhöht sich auch die Menge an notwendiger Verdichtungsenergie im Durchschnitt um 440% und es wird unerlässlich sein, strengere Regulierungsvorschriften zur zeitlichen Abstimmung von Ein- und Ausspeisungen einzuführen, um zukünftig äquivalente Energiemengen mit Wasserstoff transportieren zu können.
Wie sehen Worst-Case-Transportszenarien für die Netze aus?
Bei der Diskussion über eine stabile Netzsteuerung stellt sich natürlich auch die Frage, wie Worst-Case-Transportszenarien aussehen. Diese Szenarien sind auch entscheidend für die Bestimmung der technischen Kapazität eines Gastransportnetzes, welche die maximale Menge an Gas beschreibt, die durch das Netz transportiert werden kann. Herkömmliche Ansätze zur Ermittlung dieser Kapazität basieren auf der Analyse einer begrenzten Anzahl von Szenarien, die ein breites Spektrum möglicher, aber schwieriger Transportsituationen repräsentieren sollen.
In diesem Zusammenhang haben wir zwei neue Schweregradmaße zur Bewertung von Transportszenarien vorgeschlagen: das minimale Transportmoment und das potenzielle Transportmoment. Um entsprechende Worst-Case-Szenarien zu ermitteln, welche diesen Schweregradmaßen entsprechen, haben wir zudem das Maximum Transportation Problem (MaxTP) und das Maximum Potential Transport Moment Problem (MaxPTM) eingeführt.
MaxTP und MaxPTM können als sogenannte Stackelberg-Spiele modelliert werden. Hierbei wählt zunächst der Leader ein mögliches Transportszenario aus. Der Follower, in diesem Fall der Übertragungsnetzbetreiber (ÜNB), leitet dann den Gasfluss gemäß einem vorgegebenen Transportmodell und einer Zielfunktion, die das Schweregradmaß darstellt, durch das Netz. Um das Worst-Case-Szenario zu ermitteln, wählt der Leader also ein Transportszenario aus, das zu maximalen Transportanforderungen für den ÜNB führt.
Im Fall von MaxTP löst der Follower zu einem vom Leader gewählten Transportszenario das resultierende Min-Cost-Flow-Problem ohne Kapazitätsbeschränkungen, was zu einem linearen zweistufigen Optimierungsproblem führt, welches wir anschließend in ein MILP überführen können.
MaxPTM basiert auf einem linearen potenzialbasierten Flussmodell, das in Bezug auf die Gasflussphysik als realistischer angesehen werden kann. Dieses Transportmodell hat zudem den Vorteil, dass zu einem gegebenen Transportszenario eine einzige zulässige Lösung existiert. Daher kann MaxPTM direkt als MILP formuliert werden.
In einer Fallstudie zeigen wir, dass unsere beiden neuen Schweregradmaße bei der Gestaltung von Testfällen zur Bewertung der technischen Kapazität von Gastransportnetzen berücksichtigt werden sollten. Die von MaxTP und MaxPTM ermittelten Worst-Case-Transportszenarien überschreiten die entsprechenden Maximalwerte in einer Menge von bereitgestellten Testfällen um 23% bzw. 30%.
Wie kann die Netzinfrastruktur effizient überwacht werden?
Defekte und beschädigte Hardware können nicht nur die Netzsteuerung beeinträchtigen, sondern auch die Sicherheit des gesamten Betriebs gefährden. Ein wichtiger Punkt ist zum Beispiel das Überprüfen der Pipelines auf Undichtigkeiten. Im Falle von Erdgasnetzen ist dies notwendig, um umweltschädliche Methanemissionen zu verhindern, während beim Wasserstofftransport Versprödung ein akutes Problem darstellt. Daher ist es von entscheidender Bedeutung, dass die Übertragungsnetzbetreiber (ÜNB) die Infrastruktur kontinuierlich überwachen, wobei eine kosteneffiziente Herangehensweise angestrebt wird.
Eine vielversprechende Methode zur Effizienzsteigerung ist der Einsatz unbemannter Luftfahrzeuge (UAVs) für diese Aufgabe. In diesem Kontext stellen wir das Length-Constrained Cycle Partition Problem (LCCP) vor, eine neue Verallgemeinerung des Traveling Salesperson Problems (TSP), das speziell entwickelt wurde, um die Routen dieser UAVs zu optimieren.
Hierbei werden die Knoten eines ungerichteten Graphen als die zu überwachenden Objekte oder Gebiete betrachtet, wobei die Gewichtungen der Kanten die Flugzeiten zwischen ihnen repräsentieren. Jeder Knoten ist zudem mit einem kritischen Gewichtswert versehen, der die maximale Dauer darstellt, für die er unbeaufsichtigt bleiben darf.
Eine knoten-disjunkte Kreispartition des Graphen ist eine zulässige Lösung für das LCCP, wenn die Länge jedes Kreises, der der Flugroute eines UAV entspricht, den kritischen Gewichtswert jedes darin enthaltenen Knotens nicht überschreitet. Es wird verlangt, dass die Flugrouten disjunkt sind, um Interferenzen zu vermeiden. Ziel des LCCP ist es, eine Lösung zu finden, die eine minimale Anzahl von Kreisen erfordert, was gleichbedeutend mit der minimalen Anzahl notwendiger UAVs ist. Durch das Kombinieren effizienter Heuristiken mit MILP-Modellen, die auf vom TSP abgeleiteten Ansätzen beruhen, sowie der Bestimmung von unteren Schranken an die notwendige Anzahl von UAVs, konnten wir in umfangreichen Experimenten auf Basis der TSPLIB zeigen, dass der von uns vorgeschlagene algorithmische Ansatz optimale Lösungen für Instanzen mit bis zu fünfzig Knoten in angemessenen Berechnungszeiträumen liefern kann.
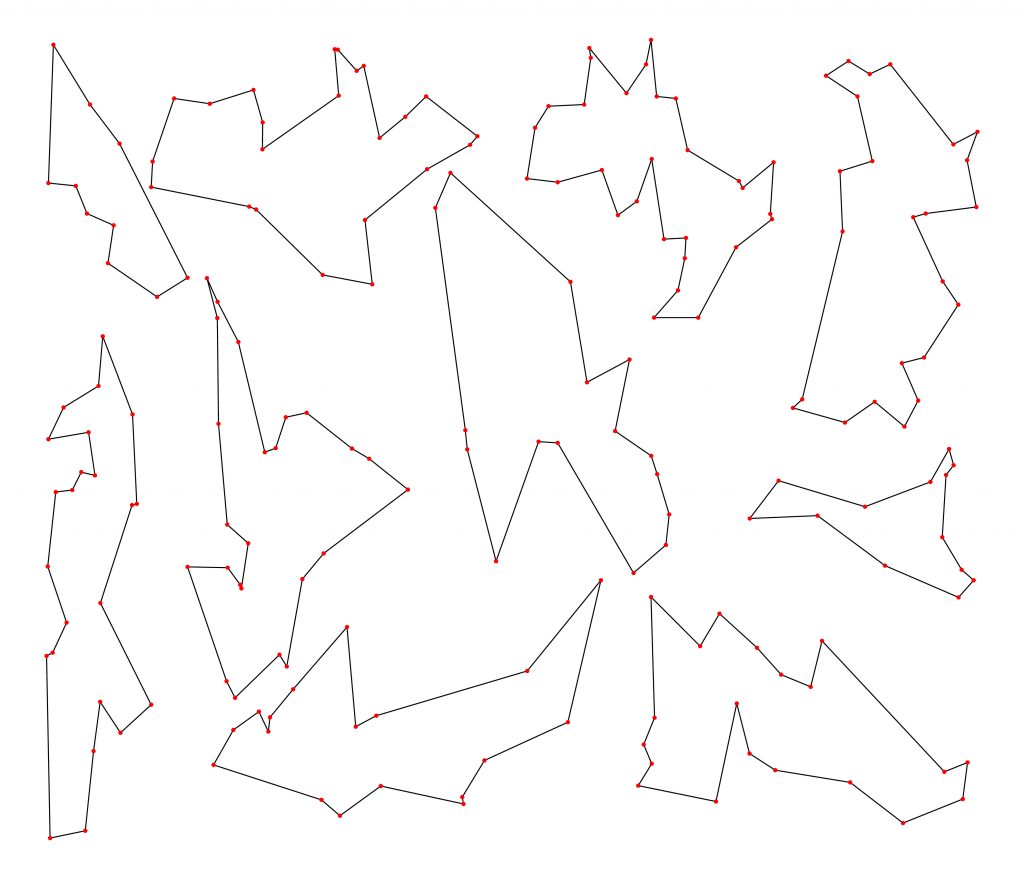
Visualisierung einer Lösung für die LCCP-Instanz kroA200 aus der TSPLIB mit 10 Kreisen.